Rotation with Constant Angular Acceleration

10.2 Rotation with Constant Angular Acceleration
Learning Objectives
By the end of this section, you will be able to:
- Derive the kinematic equations for rotational motion with constant angular acceleration
- Select from the kinematic equations for rotational motion with constant angular acceleration the appropriate equations to solve for unknowns in the analysis of systems undergoing fixed-axis rotation
- Use solutions found with the kinematic equations to verify the graphical analysis of fixed-axis rotation with constant angular acceleration
Kinematics of Rotational Motion
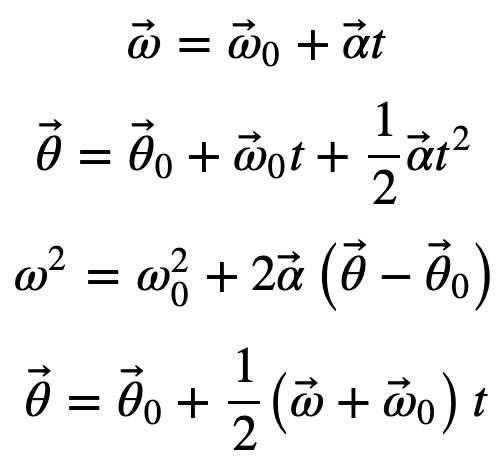
Using our intuition, we can begin to see how the rotational quantities 𝜃, 𝜔, 𝛼, and t are related to one another. For example, we saw in the preceding section that if a flywheel has an angular acceleration in the same direction as its angular velocity vector, its angular velocity increases with time and its angular displacement also increases. On the contrary, if the angular acceleration is opposite to the angular velocity vector, its angular velocity decreases with time. We can describe these physical situations and many others with a consistent set of rotational kinematic equations under a constant angular acceleration. The method to investigate rotational motion in this way is called kinematics of rotational motion.

Practice!
| Practice 10.2.1 |
|---|
 A wheel is rotating counterclockwise, which we will define as the positive direction, at an angular velocity of 2 rad/s. If the wheel then experiences a clockwise angular acceleration of 1 rad/s2, what is the wheel’s angular velocity 3 seconds later? |
| (a) 1 rad/s counterclockwise |
| (b) 1 rad/s clockwise |
| (c) 5 rad/s counterclockwise |
| (d) 5 rad/s clockwise |
Three seconds later, the wheel’s angular velocity will be 1 rad/s clockwise. For systems that rotate with a uniform angular acceleration, we can find the instantaneous angular velocity with ![]() . The initial angular velocity will be +2 rad/s because it is in the counterclockwise direction and the angular acceleration will be -1 rad/s2 because it is in the clockwise direction. The result of the calculation is -1 rad/s where the negative sign signifies clockwise rotation.
. The initial angular velocity will be +2 rad/s because it is in the counterclockwise direction and the angular acceleration will be -1 rad/s2 because it is in the clockwise direction. The result of the calculation is -1 rad/s where the negative sign signifies clockwise rotation.
| Practice 10.2.2 |
|---|
A wheel is rotating counterclockwise, which we will define as the positive direction, at an angular velocity of 2 rad/s. If the wheel then experiences a counterclockwise angular acceleration of 1 rad/s2, what is the wheel’s angular velocity 3 seconds later? |
| (a) 1 rad/s clockwise |
| (b) 1 rad/s counterclockwise |
| (c) 5 rad/s clockwise |
| (d) 5 rad/s counterclockwise |
Three seconds later, the wheel’s angular velocity will be 5 rad/s counterclockwise. For systems that rotate with a uniform angular acceleration, we can find the instantaneous angular velocity with ![]() . The initial angular velocity will be +2 rad/s because it is in the counterclockwise direction and the angular acceleration will be +1 rad/s2 because it is also in the counterclockwise direction. The result of the calculation is +5 rad/s where the positive sign signifies counterclockwise rotation.
. The initial angular velocity will be +2 rad/s because it is in the counterclockwise direction and the angular acceleration will be +1 rad/s2 because it is also in the counterclockwise direction. The result of the calculation is +5 rad/s where the positive sign signifies counterclockwise rotation.

Discuss!
Consider how you would answer these questions. Then bring this to class for a group discussion.
A wheel rotates with a constant angular acceleration of 3.05 rad/s2.
(a) If the angular speed of the wheel is 2.75 rad/s at ti = 0, through what angular displacement does the wheel rotate in 2.00 s?
(b) Through how many revolutions has the wheel turned during this time interval?
(c) What is the angular speed of the wheel at t = 2.00 s?
(d) Through what angle does the wheel rotate between t = 2.00 s and t = 8.75 s?
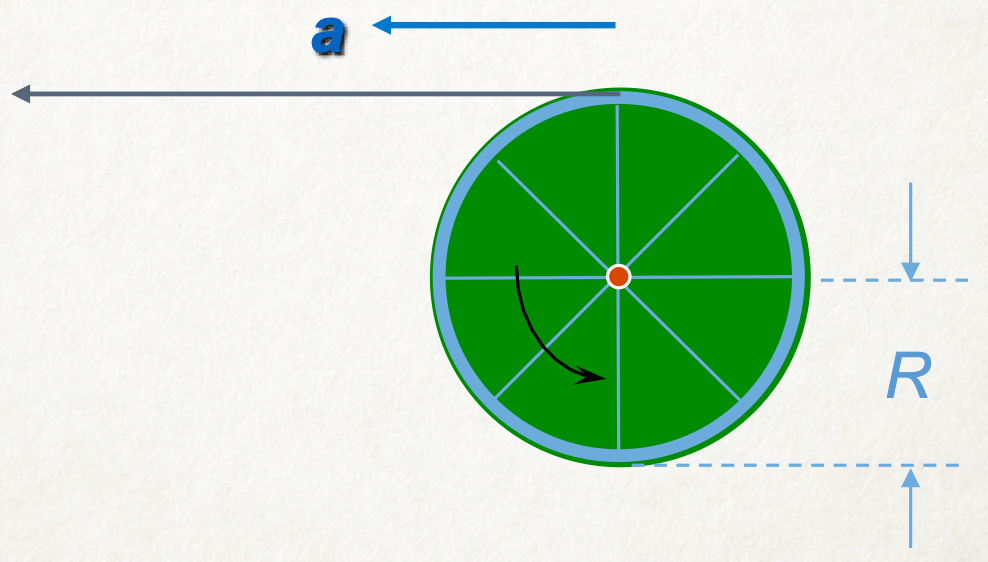
A wheel with radius R = 0.4 m rotates freely about a fixed axle. There is a rope wound around the wheel. Starting from rest at t = 0, the rope is pulled such that it has a constant acceleration a = 4 m/s2. How many revolutions has the wheel made after 10 seconds?
