13: Oscillations
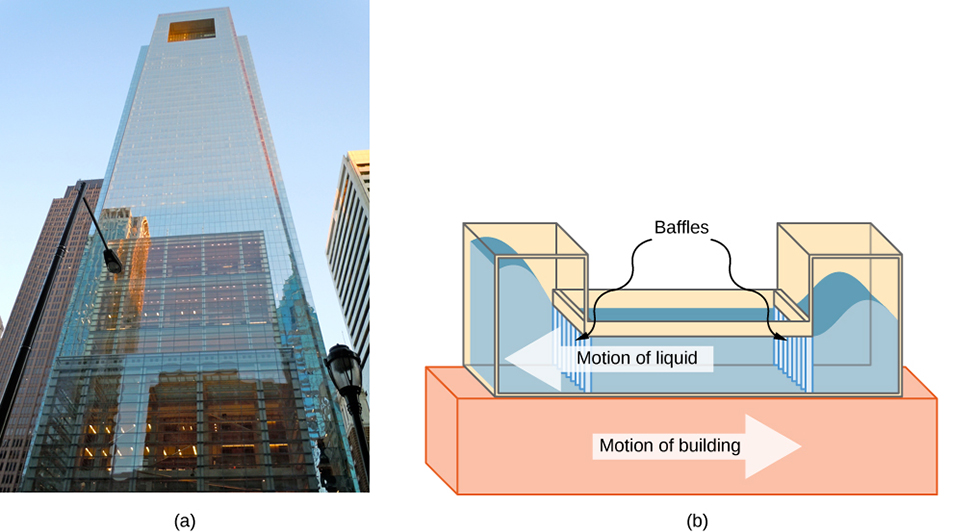
a) The Comcast Building in Philadelphia, Pennsylvania, looming high above the skyline, is approximately 305 meters (1000 feet) tall. At this height, the top floors can oscillate back and forth due to seismic activity and fluctuating winds. (b) Shown above is a schematic drawing of a tuned, liquid-column mass damper, installed at the top of the Comcast, consisting of a 300,000-gallon reservoir of water to reduce oscillations.
We begin the study of oscillations with simple systems of pendulums and springs. Although these systems may seem quite basic, the concepts involved have many real-life applications. For example, the Comcast Building in Philadelphia, Pennsylvania, stands approximately 305 meters (1000 feet) tall. As buildings are built taller, they can act as inverted, physical pendulums, with the top floors oscillating due to seismic activity and fluctuating winds. In the Comcast Building, a tuned-mass damper is used to reduce the oscillations. Installed at the top of the building is a tuned, liquid-column mass damper, consisting of a 300,000-gallon reservoir of water. This U-shaped tank allows the water to oscillate freely at a frequency that matches the natural frequency of the building. Damping is provided by tuning the turbulence levels in the moving water using baffles.
This module will give you a new take on the saying, “What goes around comes around.”
An oscillation is a motion that repeats itself. There are a myriad of examples of oscillations: a child playing on a swing, the motion of the Earth in an earthquake, a car bouncing up and down on its shock absorber, the rapid vibration of a tuning fork, the diaphragm of a loudspeaker, a quartz in a digital watch, the amount of electric current flowing in certain electric circuits, etc.!
Motion that repeats itself at regular intervals is called periodic motion. A traditional metronome provides an excellent example of periodic motion: Its periodic nature is used by musicians for timing purposes. Simple harmonic motion (SHM) describes a specific type of periodic motion. SHM provides an essential starting point for analyzing many types of motion you often see, such as the ones mentioned above.
SHM has several interesting properties. For instance, the time it takes for an object to return to an endpoint in its motion is independent of how far the object moves. Galileo Galilei is said to have noted this phenomenon during an apparently less-than-engrossing church service. He sat in the church, watching a chandelier swing back and forth during the service, and noticed that the distance the chandelier moved in its oscillations decreased over time as friction and air resistance took their toll. According to the story, he timed its period – how long it took to complete a cycle of motion – using his pulse. To his surprise, the period remained constant even as the chandelier moved less and less. (Although this is a well-known anecdote, apparently the chandelier was actually installed too late for the story to be true.)
Circular Motion is a very simple form of periodic motion. As an object moves around a circular path, the motion repeats upon each revolution. Let’s look at a simple example of a particle moving counterclockwise around a circular path with an angular speed ω. We’re going to look specifically at the x-component of the particle’s position  as it moves around this circular path.
as it moves around this circular path.

In the figures above, we can see the particle moving around the circular path. Notice how the x-component of the position vector changes as the particle moves. During the first 1/4 of the cycle, the x-component goes from a maximum value down to zero. Then, when the particle moves through the next 1/4 of the cycle, the x-component will increase from zero to its maximum value, but it will point in the negative x-direction. You can imagine what will happen to the x-component of the particle’s position for the remainder of the cycle.
Now let’s look at a graph of this particle’s position (x-component) as a function of time:

The time that it takes for the particle to get back to its starting position is called the period, T. On this x vs. t graph, the period would be T = 6.28 s.
The inverse of the period is called the frequency of the motion: f = 1/T and the frequency is measured in units of 1/s= Hz = hertz. For this graph, the frequency would be f = 1/T = 1/6.28 s = 0.16 Hz .
13.1 Simple Harmonic Motion
- Define the terms period and frequency
- List the characteristics of simple harmonic motion
- Explain the concept of phase shift
- Write the equations of motion for the system of a mass and spring undergoing simple harmonic motion
- Describe the motion of a mass oscillating on a vertical spring
13.2 Energy in Simple Harmonic Motion
- Describe the energy conservation of the system of a mass and a spring
- Explain the concepts of stable and unstable equilibrium points
13.3 Comparing Simple Harmonic Motion and Circular Motion
- Describe how the sine and cosine functions relate to the concepts of circular motion
- Describe the connection between simple harmonic motion and circular motion
13.4 Pendulums
- State the forces that act on a simple pendulum
- Determine the angular frequency, frequency, and period of a simple pendulum in terms of the length of the pendulum and the acceleration due to gravity
- Define the period for a physical pendulum
13.5 Damped Oscillations
- Describe the motion of damped harmonic motion
- Write the equations of motion for damped harmonic oscillations
- Describe the motion of driven, or forced, damped harmonic motion
- Write the equations of motion for forced, damped harmonic motion
13.6 Forced Oscillations
- Define forced oscillations
- List the equations of motion associated with forced oscillations
- Explain the concept of resonance and its impact on the amplitude of an oscillator
- List the characteristics of a system oscillating in resonance
